Parallel programming with Julia
Julia offers different levels of parallel programming
distributed processing, where jobs are split among different Julia processes
multi-threadding, where jobs are split among multiple threads within the same processes
SIMD instructions
Task switching.
In this lecture, we will focus mainly on the first two, since SIMD instructions are mainly used for low-level optimization (such as writing your own very performant BLAS library), and task switching is not a true paralelism, but allows to run a different task when one task is waiting for example for IO.
The most important lesson is that before you jump into the parallelism, be certain you have made your sequential code as fast as possible.
Process-level paralelism
Process-level paralelism means we run several instances of Julia (in different processes) and they communicate between each other using inter-process communication (IPC). The implementation of IPC differs if parallel julia instances share the same machine, or they are on different machines spread over the network. By default, different processes do not share any libraries or any variables. They are loaded clean and it is up to the user to set-up all needed code and data.
Julia's default modus operandi is a single main instance controlling several workers. This main instance has myid() == 1, worker processes receive higher numbers. Julia can be started with multiple workers from the very beggining, using -p switch as
julia -p nwhere n is the number of workers, or you can add workers after Julia has been started by
using Distributed
addprocs(n)You can also remove workers using rmprocs. When Julia is started with -p, Distributed library is loaded by default on main worker. Workers can be on the same physical machines, or on different machines. Julia offer integration via ClusterManagers.jl with most schedulling systems.
If you want to evaluate piece of code on all workers including main process, a convenience macro @everywhere is offered.
@everywhere @show myid()As we have mentioned, workers are loaded without libraries. We can see that by running
@everywhere InteractiveUtils.varinfo()which fails, but after loading InteractiveUtils everywhere
using Statistics
@everywhere begin
using InteractiveUtils
println(InteractiveUtils.varinfo(;imported = true))
endwe see that Statistics was loaded only on the main process. Thus, there is not magical sharing of data and code. With @everywhere macro we can define function and variables, and import libraries on workers as
@everywhere begin
foo(x, y) = x * y + sin(y)
foo(x) = foo(x, myid())
x = rand()
end
@everywhere @show foo(1.0)
@everywhere @show xThe fact that x has different values on different workers and master demonstrates again the independency of processes. While we can set up everything using @everywhere macro, we can also put all the code for workers into a separate file, e.g. worker.jl and load it on all workers using -L worker.jl.
Julia's multi-processing model is based on message-passing paradigm, but the abstraction is more akin to procedure calls. This means that users are saved from prepending messages with headers and implementing logic deciding which function should be called for thich header. Instead, we can schedulle an execution of a function on a remote worker and return the control immeadiately to continue in our job. A low-level function providing this functionality is remotecall(fun, worker_id, args...). For example
@everywhere begin
function delayed_foo(x, y, n )
sleep(n)
println("woked up")
foo(x, y)
end
end
r = remotecall(delayed_foo, 2, 1, 1, 60)returns immediately, even though the function will take at least 60 seconds. r does not contain result of foo(1, 1), but a struct Future, which is a remote reference in Julia's terminology. It points to data located on some machine, indicates, if they are available and allows to fetch them from the remote worker. fetch is blocking, which means that the execution is blocked until data are available (if they are never available, the process can wait forever.) The presence of data can be checked using isready, which in case of Future returned from remote_call indicate that the computation has finished.
isready(r)
fetch(r) == foo(1, 1)An advantage of the remote reference is that it can be freely shared around processes and the result can be retrieved on different node then the one which issued the call.s
r = remotecall(delayed_foo, 2, 1, 1, 60)
remotecall(r -> println("value: ",fetch(r), " retrieved on ", myid()) , 3, r)An interesting feature of fetch is that it re-throw an exception raised on a different process.
@everywhere begin
function exfoo()
throw("Exception from $(myid())")
end
end
r = @spawnat 2 exfoo()where we have used @spawnat instead of remote_call. It is higher level alternative executing a closure around the expression (in this case exfoo()) on a specified worker, in this case 2. Coming back to the example, when we fetch the result r, the exception is throwed on the main process, not on the worker
fetch(r)@spawnat can be executed with :any to signal that the user does not care, where the function will be executed and it will be left up to Julia.
r = @spawnat :any foo(1,1)
fetch(r)Finally, if you would for some reason need to wait for the computed value, you can use
remotecall_fetch(foo, 2, 1, 1)Running example: Julia sets
Our example for explaining mechanisms of distributed computing will be Julia set fractals, as they can be easily paralelized. The example is adapted from Eric Aubanel. Some fractals (Julia set, Mandelbrot) are determined by properties of some complex-valued functions. Julia set counts, how many iteration is required for
function juliaset_pixel(z₀, c)
z = z₀
for i in 1:255
abs2(z)> 4.0 && return (i - 1)%UInt8
z = z*z + c
end
return UInt8(255)
endA nice property of fractals like Julia set is that the computation can be easily paralelized, since the value of each pixel is independent from the remaining. In our experiments, the level of granurality will be one column, since calculation of single pixel is so fast, that thread or process switching will have much higher overhead.
function juliaset_column!(img, c, n, j)
x = -2.0 + (j-1)*4.0/(n-1)
for i in 1:n
y = -2.0 + (i-1)*4.0/(n-1)
@inbounds img[i,j] = juliaset_pixel(x+im*y, c)
end
nothing
endTo calculate full image
function juliaset(x, y, n=1000)
c = x + y*im
img = Array{UInt8,2}(undef,n,n)
for j in 1:n
juliaset_column!(img, c, n, j)
end
return img
endand run it and view it
using Plots
frac = juliaset(-0.79, 0.15)
plot(heatmap(1:size(frac,1),1:size(frac,2), frac, color=:Spectral))or with GLMakie
using GLMakie
frac = juliaset(-0.79, 0.15)
heatmap(frac)To observe the execution length, we will use BenchmarkTools.jl
using BenchmarkTools
julia> @btime juliaset(-0.79, 0.15);
39.822 ms (2 allocations: 976.70 KiB)Let's now try to speed-up the computation using more processes. We first make functions available to workers
@everywhere begin
function juliaset_pixel(z₀, c)
z = z₀
for i in 1:255
abs2(z)> 4.0 && return (i - 1)%UInt8
z = z*z + c
end
return UInt8(255)
end
function juliaset_column!(img, c, n, colj, j)
x = -2.0 + (j-1)*4.0/(n-1)
for i in 1:n
y = -2.0 + (i-1)*4.0/(n-1)
@inbounds img[i,colj] = juliaset_pixel(x+im*y, c)
end
nothing
end
endFor the actual parallelisation, we split the computation of the whole image into bands, such that each worker computes a smaller portion.
@everywhere begin
function juliaset_columns(c, n, columns)
img = Array{UInt8,2}(undef, n, length(columns))
for (colj, j) in enumerate(columns)
juliaset_column!(img, c, n, colj, j)
end
img
end
end
function juliaset_spawn(x, y, n = 1000)
c = x + y*im
columns = Iterators.partition(1:n, div(n, nworkers()))
r_bands = [@spawnat w juliaset_columns(c, n, cols) for (w, cols) in enumerate(columns)]
slices = map(fetch, r_bands)
reduce(hcat, slices)
endwe observe some speed-up over the serial version, but not linear in terms of number of workers
julia> @btime juliaset(-0.79, 0.15);
38.699 ms (2 allocations: 976.70 KiB)
julia> @btime juliaset_spawn(-0.79, 0.15);
21.521 ms (480 allocations: 1.93 MiB)In the above example, we spawn one function on each worker and collect the results. In essence, we are performing map over bands. Julia offers for this usecase a parallel version of map pmap. With that, our example can look like
function juliaset_pmap(x, y, n = 1000, np = nworkers())
c = x + y*im
columns = Iterators.partition(1:n, div(n, np))
slices = pmap(cols -> juliaset_columns(c, n, cols), columns)
reduce(hcat, slices)
end
julia> @btime juliaset_pmap(-0.79, 0.15);
17.597 ms (451 allocations: 1.93 MiB)which has slightly better timing then the version based on @spawnat and fetch (as explained below in section about Threads, the parallel computation of Julia set suffers from each pixel taking different time to compute, which can be relieved by dividing the work into more parts:
julia> @btime juliaset_pmap(-0.79, 0.15, 1000, 16);
12.686 ms (1439 allocations: 1.96 MiB)Shared memory
When main and all workers are located on the same process, and the OS supports sharing memory between processes (by sharing memory pages), we can use SharedArrays to avoid sending the matrix with results.
@everywhere begin
using SharedArrays
function juliaset_shared(x, y, n=1000)
c = x + y*im
img = SharedArray(Array{UInt8,2}(undef,n,n))
@sync @distributed for j in 1:n
juliaset_column!(img, c, n, j, j)
end
return img
end
end
julia> @btime juliaset_shared(-0.79, 0.15);
19.088 ms (963 allocations: 1017.92 KiB)The allocation of the Shared Array mich be costly, let's try to put the allocation outside of the loop
img = SharedArray(Array{UInt8,2}(undef,1000,1000))
function juliaset_shared!(img, x, y, n=1000)
c = x + y*im
@sync @distributed for j in 1:n
juliaset_column!(img, c, n, j, j)
end
return img
end
julia> @btime juliaset_shared!(img, -0.79, 0.15);
17.399 ms (614 allocations: 27.61 KiB)but both versions are not akin. It seems like the alocation of SharedArray costs approximately 2ms.
@distributed for (Distributed.pfor) does not allows to supply, as it splits the for cycle to nworkers() processes. Above we have seen that more splits is better
@everywhere begin
function juliaset_columns!(img, c, n, columns)
for (colj, j) in enumerate(columns)
juliaset_column!(img, c, n, colj, j)
end
end
end
img = SharedArray(Array{UInt8,2}(undef,1000,1000))
function juliaset_shared!(img, x, y, n=1000, np = nworkers())
c = x + y*im
columns = Iterators.partition(1:n, div(n, np))
pmap(cols -> juliaset_columns!(img, c, n, cols), columns)
return img
end
julia> @btime juliaset_shared!(img, -0.79, 0.15, 1000, 16);
11.760 ms (1710 allocations: 85.98 KiB)Which is almost 1ms faster than without used of pre-allocated SharedArray. Notice the speedup is now 38.699 / 11.76 = 3.29×
Synchronization / Communication primitives
The orchestration of a complicated computation might be difficult with relatively low-level remote calls. A producer / consumer paradigm is a synchronization paradigm that uses queues. Consumer fetches work intructions from the queue and pushes results to different queue. Julia supports this paradigm with Channel and RemoteChannel primitives. Importantly, putting to and taking from queue is an atomic operation, hence we do not have take care of race conditions. The code for the worker might look like
@everywhere begin
function juliaset_channel_worker(instructions, results)
while isready(instructions)
c, n, cols = take!(instructions)
put!(results, (cols, juliaset_columns(c, n, cols)))
end
end
endThe code for the main will look like
function juliaset_channels(x, y, n = 1000, np = nworkers())
c = x + y*im
columns = Iterators.partition(1:n, div(n, np))
instructions = RemoteChannel(() -> Channel(np))
foreach(cols -> put!(instructions, (c, n, cols)), columns)
results = RemoteChannel(()->Channel(np))
rfuns = [@spawnat i juliaset_channel_worker(instructions, results) for i in workers()]
img = Array{UInt8,2}(undef, n, n)
for i in 1:np
cols, impart = take!(results)
img[:,cols] .= impart;
end
img
end
julia> @btime juliaset_channels(-0.79, 0.15);The execution time is much higher then what we have observed in the previous cases and changing the number of workers does not help much. What went wrong? The reason is that setting up the infrastructure around remote channels is a costly process. Consider the following alternative, where (i) we let workers to run endlessly and (ii) the channel infrastructure is set-up once and wrapped into an anonymous function
@everywhere begin
function juliaset_channel_worker(instructions, results)
# println("worker $(myid()) has started")
while true
# println("worker $(myid()) is waiting for instructions")
c, n, cols = take!(instructions)
# println("worker $(myid()) is computing results")
put!(results, (cols, juliaset_columns(c, n, cols)))
# println("worker $(myid()) has computed results")
end
# println("worker $(myid()) has computed results")
end
end
function juliaset_init(x, y, n = 1000, np = nworkers())
c = x + y*im
columns = Iterators.partition(1:n, div(n, np))
T = Tuple{ComplexF64,Int64,UnitRange{Int64}}
instructions = RemoteChannel(() -> Channel{T}(np))
T = Tuple{UnitRange{Int64},Array{UInt8,2}}
results = RemoteChannel(()->Channel{T}(np))
foreach(p -> remote_do(juliaset_channel_worker, p, instructions, results), workers())
function compute()
img = Array{UInt8,2}(undef, n, n)
foreach(cols -> put!(instructions, (c, n, cols)), columns)
for i in 1:np
cols, impart = take!(results)
img[:,cols] .= impart;
end
img
end
end
t = juliaset_init(-0.79, 0.15)
julia> @btime t();
17.697 ms (776 allocations: 1.94 MiB)with which we obtain the comparable speed to the pmap approach.
INFO
* `remote_do` vs `remote_call` *
Instead of `@spawnat` (`remote_call`) we can also use `remote_do` as foreach`(p -> remote_do(juliaset_channel_worker, p, instructions, results), workers)`, which executes the function `juliaset_channel_worker` at worker `p` with parameters `instructions` and `results` but does not return `Future` handle to receive the future results.INFO
* `Channel` and `RemoteChannel` *
`AbstractChannel` has to implement the interface `put!`, `take!`, `fetch`, `isready` and `wait`, i.e. it should behave like a queue. `Channel` is an implementation if an `AbstractChannel` that facilitates a communication within a single process (for the purpose of multi-threadding and task switching). Channel can be easily created by `Channel{T}(capacity)`, which can be infinite. The storage of a channel can be seen in `data` field, but a direct access will of course break all guarantees like atomicity of `take!` and `put!`. For communication between proccesses, the `<:AbstractChannel` has to be wrapped in `RemoteChannel`. The constructor for `RemoteChannel(f::Function, pid::Integer=myid())` has a first argument a function (without arguments) which constructs the `Channel` (or something like that) on the remote machine identified by `pid` and returns the `RemoteChannel`. The storage thus resides on the machine specified by `pid` and the handle provided by the `RemoteChannel` can be freely passed to any process. (For curious, `ProcessGroup` `Distributed.PGRP` contains an information about channels on machines.)In the above example, juliaset_channel_worker defined as
function juliaset_channel_worker(instructions, results)
while true
c, n, cols = take!(instructions)
put!(results, (cols, juliaset_columns(c, n, cols)))
end
endruns forever due to the while true loop.
Julia does not provide by default any facility to kill the remote execution except sending ctrl-c to the remote worker as interrupt(pids::Integer...). To stop the computation, we usually extend the type accepted by the instructions channel to accept some stopping token (e.g. :stop) and stop.
@everywhere begin
function juliaset_channel_worker(instructions, results)
while true
i = take!(instructions)
i === :stop && break
c, n, cols = i
put!(results, (cols, juliaset_columns(c, n, cols)))
end
println("worker $(myid()) stopped")
put!(results, :stop)
end
end
function juliaset_init(x, y, n = 1000, np = nworkers())
c = x + y*im
columns = Iterators.partition(1:n, div(n, np))
instructions = RemoteChannel(() -> Channel(np))
results = RemoteChannel(()->Channel(np))
foreach(p -> remote_do(juliaset_channel_worker, p, instructions, results), workers())
function compute()
img = Array{UInt8,2}(undef, n, n)
foreach(cols -> put!(instructions, (c, n, cols)), columns)
for i in 1:np
cols, impart = take!(results)
img[:,cols] .= impart;
end
img
end
end
t = juliaset_init(-0.79, 0.15)
t()
foreach(i -> put!(t.instructions, :stop), workers())In the above example we paid the price of introducing type instability into the channels, which now contain types Any instead of carefully constructed tuples. But the impact on the overall running time is negligible
t = juliaset_init(-0.79, 0.15)
julia> @btime t()
17.551 ms (774 allocations: 1.94 MiB)
foreach(i -> put!(t.instructions, :stop), workers())In some use-cases, the alternative can be to put all jobs to the RemoteChannel before workers are started, and then stop the workers when the remote channel is empty as
@everywhere begin
function juliaset_channel_worker(instructions, results)
while !isready(instructions)
c, n, cols = take!(instructions)
put!(results, (cols, juliaset_columns(c, n, cols)))
end
end
endSending data
Sending parameters of functions and receiving results from a remotely called functions migh incur a significant cost.
- Try to minimize the data movement as much as possible. A prototypical example is
A = rand(1000,1000);
Bref = @spawnat :any A^2;and
Bref = @spawnat :any rand(1000,1000)^2;- It is not only volume of data (in terms of the number of bytes), but also a complexity of objects that are being sent. Serialization can be very time consuming, an efficient converstion to something simple might be worth
using BenchmarkTools
@everywhere begin
using Random
v = [randstring(rand(1:20)) for i in 1:1000];
p = [i => v[i] for i in 1:1000]
d = Dict(p)
send_vec() = v
send_dict() = d
send_pairs() = p
custom_serialization() = (length.(v), join(v, ""))
end
@btime remotecall_fetch(send_vec, 2);
@btime remotecall_fetch(send_dict, 2);
@btime remotecall_fetch(send_pairs, 2);
@btime remotecall_fetch(custom_serialization, 2);- Some type of objects cannot be properly serialized and deserialized
a = IdDict(
:a => rand(1,1),
)
b = remotecall_fetch(identity, 2, a)
a[:a] === a[:a]
a[:a] === b[:a]- If you need to send the data to worker, i.e. you want to define (overwrite) a global variable there
@everywhere begin
g = rand()
show_secret() = println("secret of ", myid(), " is ", g)
end
@everywhere show_secret()
for i in workers()
remotecall_fetch(g -> eval(:(g = $(g))), i, g)
end
@everywhere show_secret()which is implemented in the ParallelDataTransfer.jl with other variants, but in general, this construct should be avoided.
Alternatively, you can overwrite a global variable
@everywhere begin
g = rand()
show_secret() = println("secret of ", myid(), " is ", g)
function set_g(x)
global g
g = x
nothing
end
end
@everywhere show_secret()
remote_do(set_g, 2, 2)
@everywhere show_secret()Practical advices
Recall that (i) workers are started as clean processes and (ii) they might not share the same environment with the main process. The latter is due to the possibility of remote machines to have a different directory structure.
@everywhere begin
using Pkg
println(Pkg.project().path)
endOur advices earned by practice are:
to have shared directory (shared home) with code and to share the location of packages
to place all code for workers to one file, let's call it
worker.jl(author of this includes the code for master as well).put to the beggining of
worker.jlcode activating specified environment as (or specify environmnet for all workers in environment variable asexport JULIA_PROJECT="$PWD")
using Pkg
Pkg.activate(@__DIR__)and optionally
Pkg.resolve()
Pkg.instantiate()- run julia as
julia -p ?? -L worker.jl main.jlwhere main.jl is the script to be executed on the main node. Or
julia -p ?? -L worker.jl -e "main()"where main() is the function defined in worker.jl to be executed on the main node.
A complete example can be seen in juliaset_p.jl.
Multi-threadding
So far, we have been able to decrese the computation from 39ms to something like 13ms. Can we improve? Let's now turn our attention to multi-threadding, where we will not pay the penalty for IPC. Moreover, the computation of Julia set is multi-thread friendly, as all the memory can be pre-allocatted. We slightly modify our code to accept different methods distributing the work among slices in the pre-allocated matrix. To start Julia with support of multi-threadding, run it with julia -t n, where n is the number of threads. It is reccomended to set n to number of physical cores, since in hyper-threadding two threads shares arithmetic units of a single core, and in applications for which Julia was built, they are usually saturated.
using BenchmarkTools
function juliaset_pixel(z₀, c)
z = z₀
for i in 1:255
abs2(z)> 4.0 && return (i - 1)%UInt8
z = z*z + c
end
return UInt8(255)
end
function juliaset_column!(img, c, n, j)
x = -2.0 + (j-1)*4.0/(n-1)
for i in 1:n
y = -2.0 + (i-1)*4.0/(n-1)
@inbounds img[i,j] = juliaset_pixel(x+im*y, c)
end
nothing
end
function juliaset(x, y, n=1000)
c = x + y*im
img = Array{UInt8,2}(undef,n,n)
for j in 1:n
juliaset_column!(img, c, n, j)
end
return img
end
julia> @btime juliaset(-0.79, 0.15, 1000);
38.932 ms (2 allocations: 976.67 KiB)Let's now try to speed-up the calculation using multi-threadding. Julia v0.5 has introduced multi-threadding with static-scheduller with a simple syntax: just prepend the for-loop with a Threads.@threads macro. With that, the first multi-threaded version will looks like
function juliaset_static(x, y, n=1000)
c = x + y*im
img = Array{UInt8,2}(undef,n,n)
Threads.@threads :static for j in 1:n
juliaset_column!(img, c, n, j)
end
return img
endwith benchmark
julia> @btime juliaset_static(-0.79, 0.15, 1000);
15.751 ms (27 allocations: 978.75 KiB)Although we have used four-threads, and the communication overhead should be next to zero, the speed improvement is
To understand bettern what is going on, we have improved the profiler we have been developing last week. The logging profiler logs time of entering and exitting every function call of every thread, which is useful to understand, what is going on. The api is not yet polished, but it will do its job. Importantly, to prevent excessive logging, we ask to log only some functions.
using LoggingProfiler
function juliaset_static(x, y, n=1000)
c = x + y*im
img = Array{UInt8,2}(undef,n,n)
Threads.@threads :dynamic for j in 1:n
LoggingProfiler.@recordfun juliaset_column!(img, c, n, j)
end
return img
end
LoggingProfiler.initbuffer!(1000)
juliaset_static(-0.79, 0.15, 1000);
LoggingProfiler.recorded()
LoggingProfiler.adjustbuffer!()
juliaset_static(-0.79, 0.15, 1000)
LoggingProfiler.export2svg("/tmp/profile.svg")
LoggingProfiler.export2luxor("profile.png")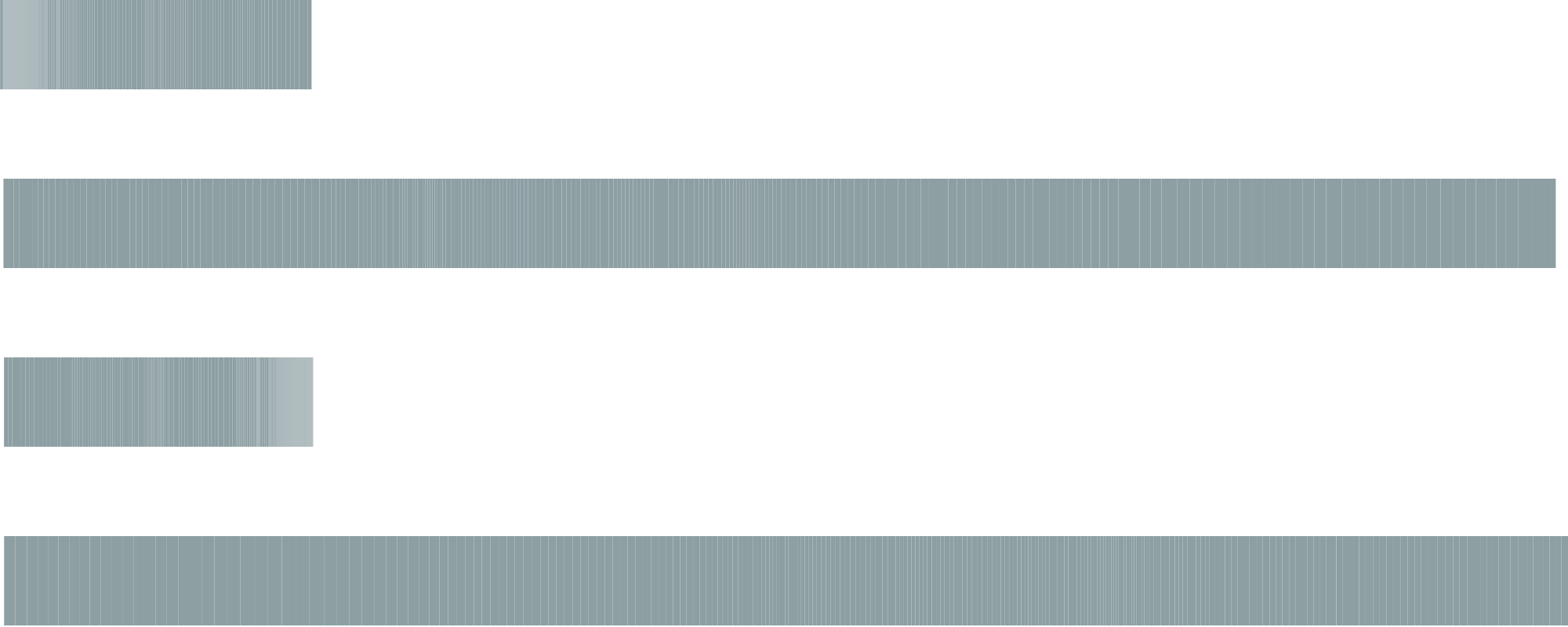 From the visualization of the profiler we can see not all threads were working the same time. Thread 1 and 4 were working less that Thread 2 and 3. The reason is that the static scheduller partition the total number of columns (1000) into equal parts, where the total number of parts is equal to the number of threads, and assign each to a single thread. In our case, we will have four parts each of size 250. Since execution time of computing value of each pixel is not the same, threads with a lot zero iterations will finish considerably faster. This is the incarnation of one of the biggest problems in multi-threadding / schedulling. A contemprary approach is to switch to dynamic schedulling, which divides the problem into smaller parts, and when a thread is finished with one part, it assigned new not-yet computed part.
From the visualization of the profiler we can see not all threads were working the same time. Thread 1 and 4 were working less that Thread 2 and 3. The reason is that the static scheduller partition the total number of columns (1000) into equal parts, where the total number of parts is equal to the number of threads, and assign each to a single thread. In our case, we will have four parts each of size 250. Since execution time of computing value of each pixel is not the same, threads with a lot zero iterations will finish considerably faster. This is the incarnation of one of the biggest problems in multi-threadding / schedulling. A contemprary approach is to switch to dynamic schedulling, which divides the problem into smaller parts, and when a thread is finished with one part, it assigned new not-yet computed part.
From 1.5, one can specify the scheduller for Threads.@thread [scheduller] for construct to be either :static and / or :dynamic. The :dynamic is compatible with the partr dynamic scheduller. From 1.8, :dynamic is default, but the range is dividided into nthreads() parts, which is the reason why we do not see an improvement.
Dynamic scheduller is also supported using by Threads.@spawn macro. The prototypical approach used for invocation is the fork-join model, where one recursivelly partitions the problems and wait in each thread for the other
function juliaset_recspawn!(img, c, n, lo=1, hi=n, ntasks=128)
if hi - lo > n/ntasks-1
mid = (lo+hi)>>>1
finish = Threads.@spawn juliaset_recspawn!(img, c, n, lo, mid, ntasks)
juliaset_recspawn!(img, c, n, mid+1, hi, ntasks)
wait(finish)
return
end
for j in lo:hi
juliaset_column!(img, c, n, j)
end
nothing
endMeasuring the time we observe four-times speedup, which corresponds to the number of threads.
function juliaset_forkjoin(x, y, n=1000, ntasks = 16)
c = x + y*im
img = Array{UInt8,2}(undef,n,n)
juliaset_recspawn!(img, c, n, 1, n, ntasks)
return img
end
julia> @btime juliaset_forkjoin(-0.79, 0.15);
10.326 ms (142 allocations: 986.83 KiB)This is so far our fastest construction with speedup 38.932 / 10.326 = 3.77×.
Unfortunatelly, the LoggingProfiler does not handle task migration at the moment, which means that we cannot visualize the results. Due to task switching overhead, increasing the granularity might not pay off.
4 tasks: 16.262 ms (21 allocations: 978.05 KiB)
8 tasks: 10.660 ms (45 allocations: 979.80 KiB)
16 tasks: 10.326 ms (142 allocations: 986.83 KiB)
32 tasks: 10.786 ms (238 allocations: 993.83 KiB)
64 tasks: 10.211 ms (624 allocations: 1021.89 KiB)
128 tasks: 10.224 ms (1391 allocations: 1.05 MiB)
256 tasks: 10.617 ms (2927 allocations: 1.16 MiB)
512 tasks: 11.012 ms (5999 allocations: 1.38 MiB)using FLoops, FoldsThreads
function juliaset_folds(x, y, n=1000, basesize = 2)
c = x + y*im
img = Array{UInt8,2}(undef,n,n)
@floop ThreadedEx(basesize = basesize) for j in 1:n
juliaset_column!(img, c, n, j)
end
return img
end
julia> @btime juliaset_folds(-0.79, 0.15, 1000);
10.253 ms (3960 allocations: 1.24 MiB)where basesize is the size of the smallest part allocated to a single thread, in this case 2 columns.
julia> @btime juliaset_folds(-0.79, 0.15, 1000);
10.575 ms (52 allocations: 980.12 KiB)function juliaset_folds(x, y, n=1000, basesize = 2)
c = x + y*im
img = Array{UInt8,2}(undef,n,n)
@floop DepthFirstEx(basesize = basesize) for j in 1:n
juliaset_column!(img, c, n, j)
end
return img
end
julia> @btime juliaset_folds(-0.79, 0.15, 1000);
10.421 ms (3582 allocations: 1.20 MiB)We can identify the best smallest size of the work basesize and measure its influence on the time
map(2 .^ (0:7)) do bs
t = @belapsed juliaset_folds(-0.79, 0.15, 1000, $(bs));
(;basesize = bs, time = t)
end |> DataFrame Row │ basesize time
│ Int64 Float64
─────┼─────────────────────
1 │ 1 0.0106803
2 │ 2 0.010267
3 │ 4 0.0103081
4 │ 8 0.0101652
5 │ 16 0.0100204
6 │ 32 0.0100097
7 │ 64 0.0103293
8 │ 128 0.0105411We observe that the minimum is for basesize = 32, for which we got 3.8932× speedup.
Garbage collector is single-threadded
Keep reminded that while threads are very easy very convenient to use, there are use-cases where you might be better off with proccess, even though there will be some communication overhead. One such case happens when you need to allocate and free a lot of memory. This is because Julia's garbage collector is single-threadded (in 1.10 it is now partially multi-threaded). Imagine a task of making histogram of bytes in a directory. For a fair comparison, we will use Transducers, since they offer thread and process based paralelism
using Transducers
@everywhere begin
function histfile(filename)
h = Dict{UInt8,Int}()
foreach(open(read, filename, "r")) do b
h[b] = get(h, b, 0) + 1
end
h
end
end
files = filter(isfile, readdir("/Users/tomas.pevny/Downloads/", join = true))
@elapsed foldxd(mergewith(+), files |> Map(histfile))
150.863183701and using the multi-threaded version of map
@elapsed foldxt(mergewith(+), files |> Map(histfile))
205.309952618we see that the threadding is actually worse than process based paralelism despite us paying the price for serialization and deserialization of Dict. Needless to say that changing Dict to Vector as
using Transducers
@everywhere begin
function histfile(filename)
h = Dict{UInt8,Int}()
foreach(open(read, filename, "r")) do b
h[b] = get(h, b, 0) + 1
end
h
end
end
files = filter(isfile, readdir("/Users/tomas.pevny/Downloads/", join = true))
@elapsed foldxd(mergewith(+), files |> Map(histfile))
86.44577969
@elapsed foldxt(mergewith(+), files |> Map(histfile))
105.32969331is much better.
Thread local storage
Based on https://julialang.org/blog/2023/07/PSA-dont-use-threadid/
Imagine a case where you want to use a local variable inside the threads. It is tempting to allocate them and access them based on threadid. A prototypical wrong code (but correct on older versions of Julia) is
using Base.Threads: nthreads, @threads, threadid
states = [some_initial_value for _ in 1:nthreads()]
@threads for x in some_data
tid = threadid()
old_val = states[tid]
new_val = some_operator(old_val, f(x))
states[tid] = new_val
end
do_something(states)The above code is incorrect because the tasks spawned by @threads are allowed to yield to other tasks during their execution. This means that between reading old_val and storing new_val in the storage, the task could be paused and a new task running on the same thread with the same threadid()``could concurrently write tostates[tid]``, causing a race condition and thus work being lost.
This is not actually a problem with multithreading specifically, but really a concurrency problem, and it can be demonstrated even with a single thread. For example:
$ julia --threads=1
julia> f(i) = (sleep(0.001); i);
julia> let state = [0], N=100
@sync for i ∈ 1:N
Threads.@spawn begin
tid = Threads.threadid() # Each task gets `tid = 1`.
old_var = state[tid] # Each task reads the current value, which for
# all is 0 (!) because...
new_var = old_var + f(i) # ...the `sleep` in `f` causes all tasks to pause
# *simultaneously* here (all loop iterations start,
# but do not yet finish).
state[tid] = new_var # After being released from the `sleep`, each task
# sets `state[1]` to `i`.
end
end
sum(state), sum(1:N)
end
(100, 5050)In the above snippet, we purposefully over-subscribed the CPU with 100 separate tasks in order to make the bug more likely to manifest, but the problem can arise even without spawning very many tasks.
If you want a recipe that can replace the above buggy one with something that can be written using only the Base.Threadsmodule, we recommend moving away from @threads, and instead working directly with @spawn to create and manage tasks. The reason is that @threads does not have any builtin mechanisms for managing and merging the results of work from different threads, whereas tasks can manage and return their own state in a safe way.
Tasks creating and returning their own state is inherently safer than the spawner of parallel tasks setting up state for spawned tasks to read from and write to.
Code which replaces the incorrect code pattern shown above can look like this:
using Base.Threads: nthreads, @threads, @spawn
using Base.Iterators: partition
tasks_per_thread = 2 # customize this as needed. More tasks have more overhead, but better
# load balancing
chunk_size = max(1, length(some_data) ÷ (tasks_per_thread * nthreads()))
data_chunks = partition(some_data, chunk_size) # partition your data into chunks that
# individual tasks will deal with
#See also ChunkSplitters.jl and SplittablesBase.jl for partitioning data
tasks = map(data_chunks) do chunk
# Each chunk of your data gets its own spawned task that does its own local, sequential work
# and then returns the result
@spawn begin
state = some_initial_value
for x in chunk
state = some_operator(state, f(x))
end
return state
end
end
states = fetch.(tasks) # get all the values returned by the individual tasks. fetch is type
# unstable, so you may optionally want to assert a specific return type.
do_something(states)Locks / lock-free multi-threadding
Avoid locks.
Take away message
When deciding, what kind of paralelism to employ, consider following
for tightly coupled computation over shared data, multi-threadding is more suitable due to non-existing sharing of data between processes
but if the computation requires frequent allocation and freeing of memery, or IO, separate processes are multi-suitable, since garbage collectors are independent between processes
Making all cores busy while achieving an ideally linear speedup is difficult and needs a lot of experience and knowledge. Tooling and profilers supporting debugging of parallel processes is not much developped.
Transducersthrives for (almost) the same code to support thread- and process-based paralelism.
Materials
Complexity of thread schedulling https://www.youtube.com/watch?v=YdiZa0Y3F3c
Malt.jl a library supporting process sandboxing (and killing)
http://cecileane.github.io/computingtools/pages/notes1209.html
https://lucris.lub.lu.se/ws/portalfiles/portal/61129522/julia_parallel.pdf
http://igoro.com/archive/gallery-of-processor-cache-effects/
https://www.csd.uwo.ca/~mmorenom/cs2101a_moreno/Parallel_computing_with_Julia.pdf
Threads: https://juliahighperformance.com/code/Chapter09.html
Processes: https://juliahighperformance.com/code/Chapter10.html
Examples: ?Heat equation? from [https://hpc.llnl.gov/training/tutorials/](introduction-parallel-computing-tutorial#Examples(https://hpc.llnl.gov/training/tutorials/)