Homework 12 - The Runge-Kutta ODE Solver
There exist many different ODE solvers. To demonstrate how we can get significantly better results with a simple update to Euler, you will implement the second order Runge-Kutta method RK2:
\[\begin{align*} \tilde x_{n+1} &= x_n + hf(x_n, t_n)\\ x_{n+1} &= x_n + \frac{h}{2}(f(x_n,t_n)+f(\tilde x_{n+1},t_{n+1})) \end{align*}\]
RK2 is a 2nd order method. It uses not only $f$ (the slope at a given point), but also $f'$ (the derivative of the slope). With some clever manipulations you can arrive at the equations above with make use of $f'$ without needing an explicit expression for it (if you want to know how, see here). Essentially, RK2 computes an initial guess $\tilde x_{n+1}$ to then average the slopes at the current point $x_n$ and at the guess $\tilde x_{n+1}$ which is illustarted below. 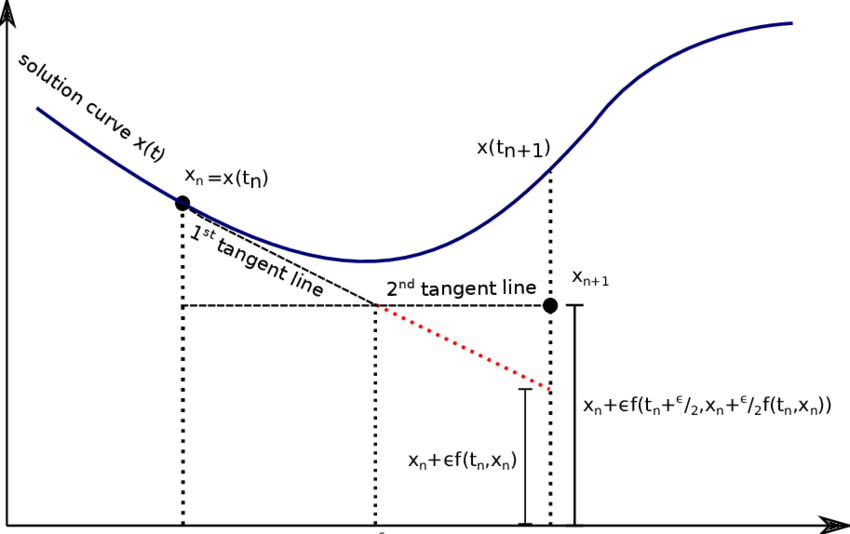
The code from the lab that you will need for this homework is given below. As always, put all your code in a file called hw.jl, zip it, and upload it to BRUTE.
struct ODEProblem{F,T<:Tuple{Number,Number},U<:AbstractVector,P<:AbstractVector}
f::F
tspan::T
u0::U
θ::P
end
abstract type ODESolver end
struct Euler{T} <: ODESolver
dt::T
end
function (solver::Euler)(prob::ODEProblem, u, t)
f, θ, dt = prob.f, prob.θ, solver.dt
(u + dt*f(u,θ), t+dt)
end
function solve(prob::ODEProblem, solver::ODESolver)
t = prob.tspan[1]; u = prob.u0
us = [u]; ts = [t]
while t < prob.tspan[2]
(u,t) = solver(prob, u, t)
push!(us,u)
push!(ts,t)
end
ts, reduce(hcat,us)
end
# Define & Solve ODE
function lotkavolterra(x,θ)
α, β, γ, δ = θ
x₁, x₂ = x
dx₁ = α*x₁ - β*x₁*x₂
dx₂ = δ*x₁*x₂ - γ*x₂
[dx₁, dx₂]
endlotkavolterra (generic function with 1 method)Implement the 2nd order Runge-Kutta solver according to the equations given above by overloading the call method of a new type RK2.
(solver::RK2)(prob::ODEProblem, u, t)You should be able to use it exactly like our Euler solver before:
using Plots
using JLD2
# Define ODE
function lotkavolterra(x,θ)
α, β, γ, δ = θ
x₁, x₂ = x
dx₁ = α*x₁ - β*x₁*x₂
dx₂ = δ*x₁*x₂ - γ*x₂
[dx₁, dx₂]
end
θ = [0.1,0.2,0.3,0.2]
u0 = [1.0,1.0]
tspan = (0.,100.)
prob = ODEProblem(lotkavolterra,tspan,u0,θ)
# load correct data
true_data = load("lotkadata.jld2")
# create plot
p1 = plot(true_data["t"], true_data["u"][1,:], lw=4, ls=:dash, alpha=0.7,
color=:gray, label="x Truth")
plot!(p1, true_data["t"], true_data["u"][2,:], lw=4, ls=:dash, alpha=0.7,
color=:gray, label="y Truth")
# Euler solve
(t,X) = solve(prob, Euler(0.2))
plot!(p1,t,X[1,:], color=3, lw=3, alpha=0.8, label="x Euler", ls=:dot)
plot!(p1,t,X[2,:], color=4, lw=3, alpha=0.8, label="y Euler", ls=:dot)
# RK2 solve
(t,X) = solve(prob, RK2(0.2))
plot!(p1,t,X[1,:], color=1, lw=3, alpha=0.8, label="x RK2")
plot!(p1,t,X[2,:], color=2, lw=3, alpha=0.8, label="y RK2")